Table of Contents
Overview
In accordance with REP-105[1] and guided by the design principals laid out in Localization Design, the following localization architecture will be used for the AVP 2020 Demo and will form the basis for future improvements for the Autoware.Auto localization architecture.
Frames
The following frames are defined:
/earth/map/semantic_map/odom/base_link/nav_base(optional)- Additional coordinate frames should be attached to the
/base_linkframe to represent sensor frames - Optional coordinate frames may be attached to the
/base_linkframe for ease of sensor calibration
REP-105[1] provides enough specificity with regard to most frames for a concrete implementation with the exception of the /base_link frame and the newly-added /nav_base frame. For the purposes of this demo, the location of the /base_link frame shall be defined as:
- A location which is rigidly attached to the vehicle frame coincident with the center of the rear axle of the vehicle, as measured under the following conditions:
- The vehicle is free of any additional load aside from the equipment and components provided by the vehicle manufacturer upon delivery
- The tire pressure meets the manufacturer specifications in all four tires
- The vehicle is placed on flat, level ground
For the purposes of this demo, the location of the optional /nav_base frame shall be defined as:
- A location which is rigidly attached to the vehicle frame coincident in X and Y coordinates with the center of gravity of the vehicle.
Assumptions
The following assumptions are made for the provided localization architecture:
- A static, globally-fixed sensor data map is available for localization (sensor map)
- A static, globally-fixed semantic data map is available for traffic rules and some stationary objects (semantic map)
- Locally-referenced odometry sensor data are available from one or more sources
- Locally-referenced environmental sensor data are available from one or more sources
- Globally-referenced position data are available from one or more sources
Components
The final localization stack for the AVP 2020 Demo should have the following components:
- Global State Estimator
- Input: Globally-referneced sensor data (e.g. GPS)
- Output:
sensor_msgs/PoseWithCovarianceStampedin/earthframe
- Pose Transformer
- Input:
sensor_msgs/PoseWithCovarianceStampedin source frame - Input: Transform which contains the frame used in the
sensor_msgs/PoseWithCovarianceStamped - Input: Target frame for transform
- Output:
sensor_msgs/PoseWithCovarianceStampedin target frame
- Input:
- Environmental Sensor Localizer
- Example: NDT Matching
- Input: Locally-referenced sensor data with a fixed, external localization environment (e.g. lidar, radar)
- Input: Globally-referenced sensor data map (e.g. point cloud)
- Input:
sensor_msgs/PoseWithCovarianceStampedin/mapframe from Global State Estimator, passed through Pose Transformer to transform from/earth->/map - Output:
sensor_msgs/PoseWithCovarianceStampedin/mapframe
- Odometry State Estimator
- Input: Locally-referenced sensor data with no fixed, external localization environment (e.g. wheel encoders, visual odometry, accelerometer, gyroscope)
- Output:
/odom->/base_linktransform
- Map State Estimator
- Input:
/odom->/base_linktransform - Input:
sensor_msgs/PoseWithCovarianceStampedin/mapframe from Environmental Sensor Localizer - Input:
sensor_msgs/PoseWithCovarianceStampedin/mapframe from Global State Estimator, passed through Pose Transformer to transform from/earth->/map - Output:
/map->/odomtransform
- Input:
Transforms
The final localization stack for the AVP 2020 Demo should have the following transforms available:
/base_link-><sensor_frame>: Static. Published bytf2::static_transform_publisherorrobot_descriptionwhen using a URDF file.- Explanation: It is assumed that all sensors which are attached to the body of the mobile robot are done so rigidly and are not free to move. Being as
/base_linkis a frame that is defined as being tied to a fixed point on the mobile robot's body, any transform between a sensor and/base_linkwould be static.
- Explanation: It is assumed that all sensors which are attached to the body of the mobile robot are done so rigidly and are not free to move. Being as
/base_link->/nav_base: Static. Published bytf2::static_transform_publisherorrobot_descriptionwhen using a URDF file.- Explanation: While the location of the
/base_linkframe is useful for some vehicle models and longer-term path planning, the center-of-mass of the vehicle is more useful in short-term path planning and for estimating vehicle dynamics. However, in certain operational design domains, measuring the center-of-mass of the vehicle with enough specificity to be useful is not worth the effort which is why this frame is optional.
- Explanation: While the location of the
/odom->/base_link: Dynamic. Published by Odometry State Estimator.- Explanation: While localization to the local map provides a globally-fixed location estimate, no sensor or algorithm to localize to the local map can be considered infallible and can not be trusted to always provide a continuous, error-free position. In addition, an Environmental Sensor Localizer can not be expected to provide an accurate localization estimate when an initial position in the local map has not yet been computed. Since navigation is based on the full
/map->/base_linktransform, this estimate can be used for navigation even when a globally-relative or map-relative position is not yet available.
- Explanation: While localization to the local map provides a globally-fixed location estimate, no sensor or algorithm to localize to the local map can be considered infallible and can not be trusted to always provide a continuous, error-free position. In addition, an Environmental Sensor Localizer can not be expected to provide an accurate localization estimate when an initial position in the local map has not yet been computed. Since navigation is based on the full
/map->/odom: Dynamic. Published by Map State Estimator.- Explanation: The Map State Estimator takes the position estimate provided by the Environmental Sensor Localizer (a
/map->/base_linkrelation) as well as the position estimate provided by the Global State Estimator (a/map->/base_linkrelation after being passed through the Pose Transformer using the/earth->/maptransform) and fuses them into a single/map->/base_linkestimate. It then relates this estimate to the origin of the odom frame as a/map->/odomtransform, which it publishes. This allows integration of both the odometry localization data and environmental sensor localization data into a transform tree of/map->/odom->/base_linkwhich should be considered a single transform (i.e. ephemeral/map->/base_link) by navigation and planning components.
- Explanation: The Map State Estimator takes the position estimate provided by the Environmental Sensor Localizer (a
/map->/semantic_map: Static. Published bytf2::static_transform_publisheror Map Loader- Explanation: Since there often exists an offset between the origin of the Semantic Map and the origin of the Sensor Map, different frames for each map are necessary. Also, since localization is usually more time-sensitive than functions which utilize the Semantic Map, the typical
/mapframe is tied to the Sensor Map which avoids a transform lookup in localization but necessitates one in functions that use the Semantic Map such as path planning. Making this transform required rather than optional avoids an unnecessary dependency between the sensor and semantic maps. Additionally, ommitting this transform would necessitate an assumption that both the semantic map and the sensor map have coincident origins which would require either another unnecessary interdependence or run-time verification of this assumption, which causes an order-of-operations dependency.
- Explanation: Since there often exists an offset between the origin of the Semantic Map and the origin of the Sensor Map, different frames for each map are necessary. Also, since localization is usually more time-sensitive than functions which utilize the Semantic Map, the typical
/earth->/map: If a map server is used, dynamic but non-contiguous and published by the map server. If no map server is used, static and published bytf2::static_transform_publisher- Explanation: Since the Sensor Map (published in the
/mapframe) is defined as being globally-fixed, this transform relates the origin of the Sensor Map to the origin of the/earthframe which is referenced as ECEF. The publication of this transform is necessary for the Environmental Sensor Localizer to create an initial position estimate using the output from the Global State Estimator. This transform is also necessary for the Map State Estimator to be able to utilize the output from the Global State Estimator as a fusion input.
- Explanation: Since the Sensor Map (published in the
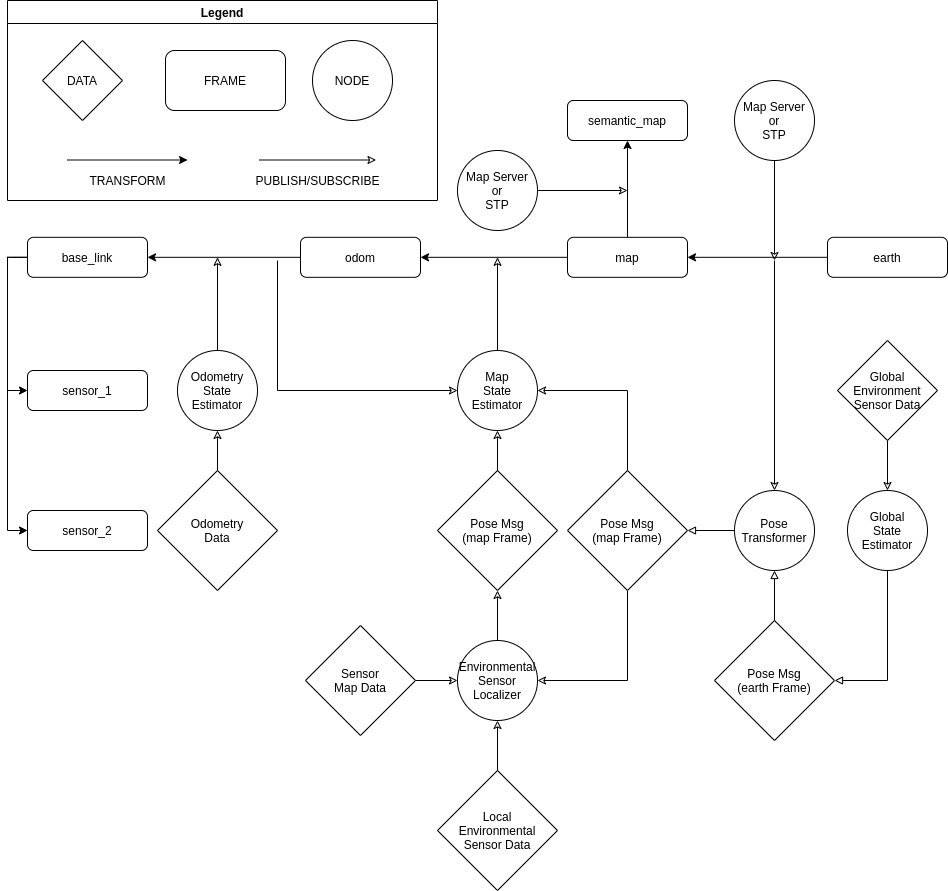
Diagram
The following diagram depicts this architecture: