controller_base_node.hpp File Reference
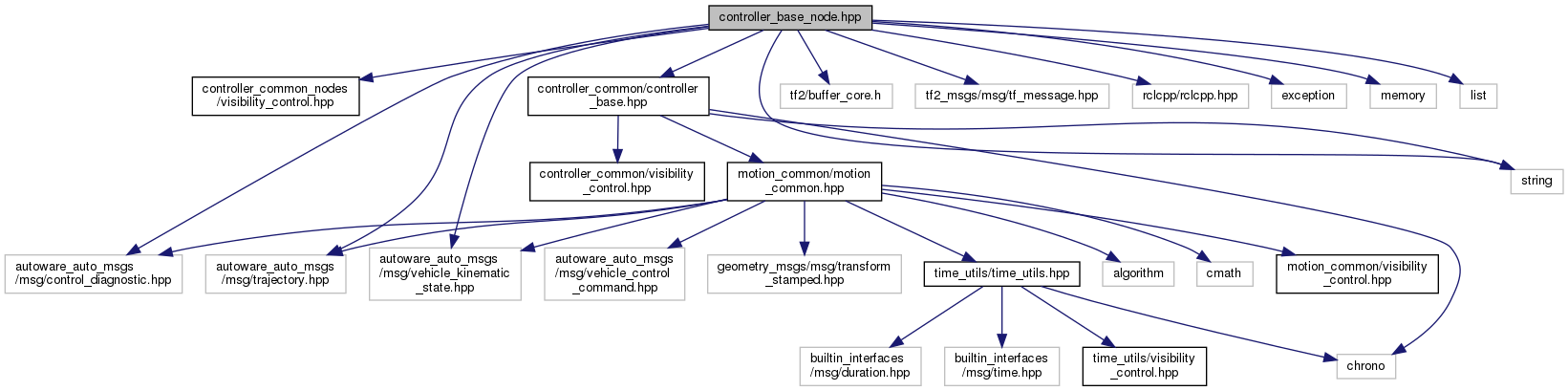
#include <controller_common_nodes/visibility_control.hpp>#include <autoware_auto_msgs/msg/control_diagnostic.hpp>#include <autoware_auto_msgs/msg/trajectory.hpp>#include <autoware_auto_msgs/msg/vehicle_kinematic_state.hpp>#include <controller_common/controller_base.hpp>#include <tf2/buffer_core.h>#include <tf2_msgs/msg/tf_message.hpp>#include <rclcpp/rclcpp.hpp>#include <exception>#include <memory>#include <list>#include <string>
Include dependency graph for controller_base_node.hpp:
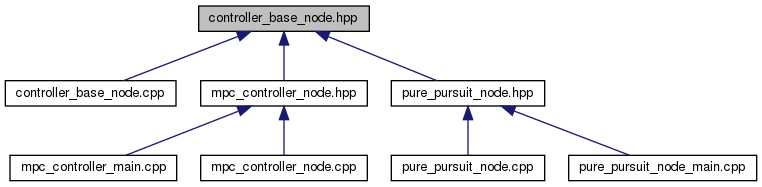
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | motion::control::controller_common_nodes::ControllerBaseNode |
Namespaces | |
| motion | |
| motion::control | |
| motion::control::controller_common_nodes | |
Typedefs | |
| using | motion::control::controller_common_nodes::ControllerPtr = std::unique_ptr< controller_common::ControllerBase > |