covariance_insertion_node.hpp File Reference
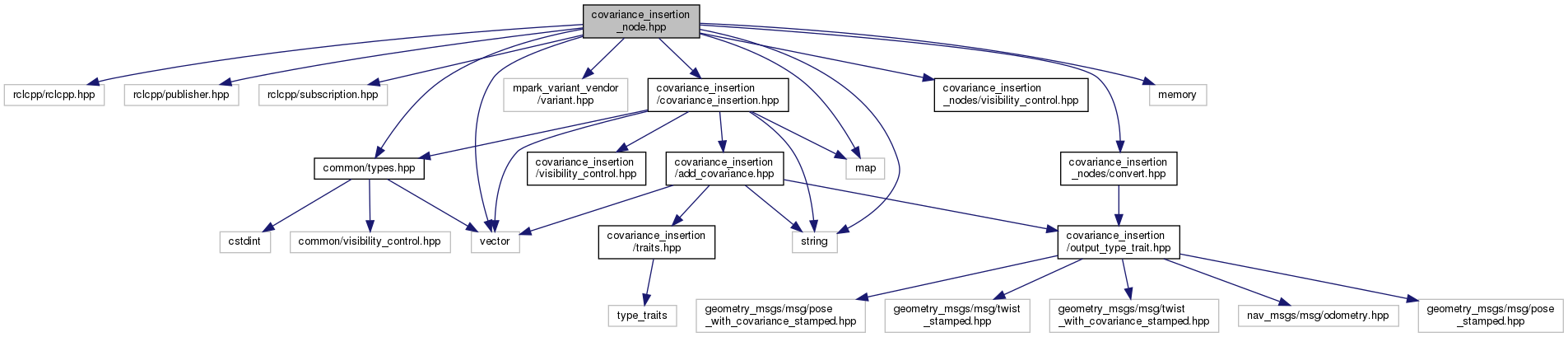
#include <rclcpp/rclcpp.hpp>#include <rclcpp/publisher.hpp>#include <rclcpp/subscription.hpp>#include <common/types.hpp>#include <mpark_variant_vendor/variant.hpp>#include <covariance_insertion/covariance_insertion.hpp>#include <covariance_insertion_nodes/visibility_control.hpp>#include <covariance_insertion_nodes/convert.hpp>#include <string>#include <map>#include <memory>#include <vector>
Include dependency graph for covariance_insertion_node.hpp:
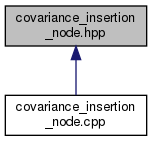
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::covariance_insertion_nodes::CovarianceInsertionNode |
| ROS 2 Node for the covariance_insertion_nodes. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::covariance_insertion_nodes | |