lfit.hpp File Reference
This file implements 2D pca on a linked list of points to estimate an oriented bounding box. More...
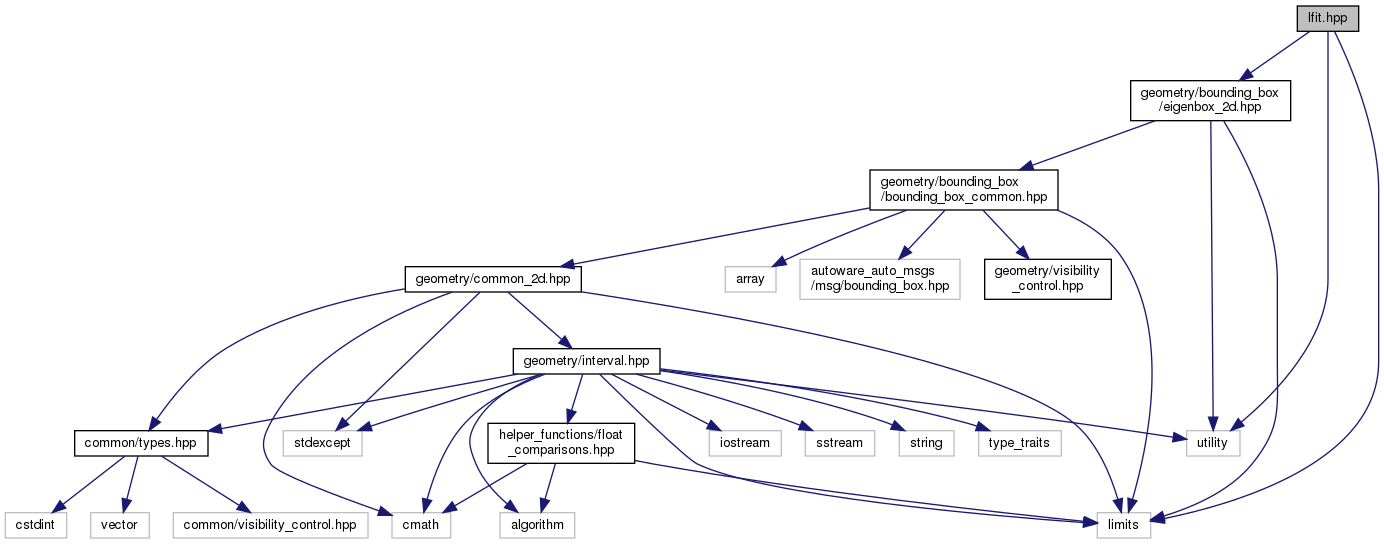
Include dependency graph for lfit.hpp:
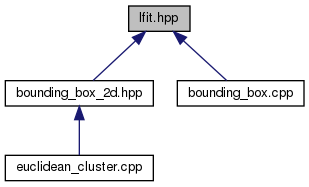
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | autoware::common::geometry::bounding_box::details::LFitWs |
| A representation of the M matrix for the L-fit algorithm. More... | |
| class | autoware::common::geometry::bounding_box::details::LFitCompare< PointT > |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::common | |
| autoware::common::geometry | |
| autoware::common::geometry::bounding_box | |
| Functions and types for generating enclosing bounding boxes around a set of points. | |
| autoware::common::geometry::bounding_box::details | |
Functions | |
| template<typename IT > | |
| void | autoware::common::geometry::bounding_box::details::init_lfit_ws (const IT begin, const IT end, const std::size_t size, LFitWs &ws) |
| Initialize M matrix for L-fit algorithm. More... | |
| template<typename PointT > | |
| float32_t | autoware::common::geometry::bounding_box::details::solve_lfit (const LFitWs &ws, PointT &dir) |
| Solves the L fit problem for a given M matrix. More... | |
| template<typename PointT > | |
| void | autoware::common::geometry::bounding_box::details::increment_lfit_ws (const PointT &pt, LFitWs &ws) |
| Increments L fit M matrix with information in the point. More... | |
| template<typename IT > | |
| BoundingBox | autoware::common::geometry::bounding_box::details::lfit_bounding_box_2d_impl (const IT begin, const IT end, const std::size_t size) |
| The main implementation of L-fitting a bounding box to a list of points. Assumes sufficiently valid, large enough, and appropriately ordered point list. More... | |
| template<typename IT , typename PointT > | |
| BoundingBox | autoware::common::geometry::bounding_box::lfit_bounding_box_2d (const IT begin, const IT end, const PointT hint, const std::size_t size) |
| Compute bounding box which best fits an L-shaped cluster. Uses the method proposed in "Efficient L-shape fitting of laser scanner data for vehicle pose estimation". More... | |
| template<typename IT > | |
| BoundingBox | autoware::common::geometry::bounding_box::lfit_bounding_box_2d (const IT begin, const IT end) |
| Compute bounding box which best fits an L-shaped cluster. Uses the method proposed in "Efficient L-shape fitting of laser scanner data for vehicle pose estimation". This implementation sorts the list using std::sort. More... | |
Detailed Description
This file implements 2D pca on a linked list of points to estimate an oriented bounding box.