line_search.hpp File Reference
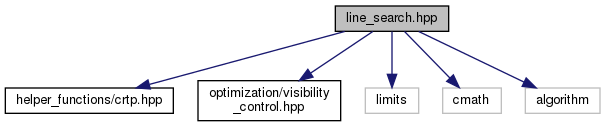
#include <helper_functions/crtp.hpp>#include <optimization/visibility_control.hpp>#include <limits>#include <cmath>#include <algorithm>
Include dependency graph for line_search.hpp:
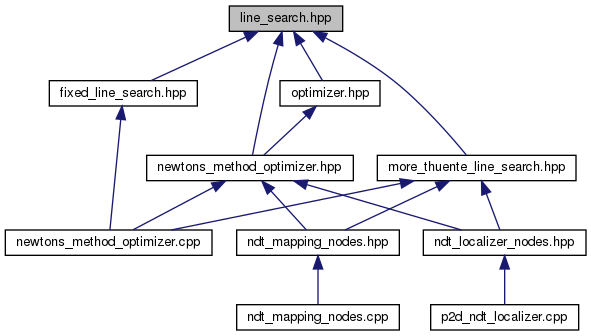
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::common::optimization::LineSearch< Derived > |
| Base class (CRTP) to mange the step length during optimization. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::common | |
| autoware::common::optimization | |