localization/ndt/include/ndt/utils.hpp File Reference
#include <Eigen/Core>#include <Eigen/Geometry>#include <geometry_msgs/msg/transform.hpp>#include <geometry_msgs/msg/pose.hpp>#include <Eigen/Eigenvalues>#include <limits>
Include dependency graph for localization/ndt/include/ndt/utils.hpp:

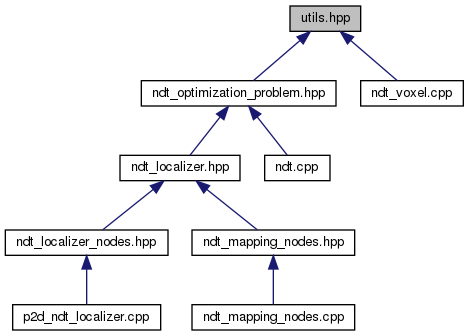
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::localization | |
| autoware::localization::ndt | |
| autoware::localization::ndt::transform_adapters | |
Typedefs | |
| template<typename T > | |
| using | autoware::localization::ndt::EigenPose = Eigen::Matrix< T, 6U, 1U > |
| template<typename T > | |
| using | autoware::localization::ndt::EigenTransform = Eigen::Transform< T, 3, Eigen::Affine, Eigen::ColMajor > |
| using | autoware::localization::ndt::RosTransform = geometry_msgs::msg::Transform |
| using | autoware::localization::ndt::RosPose = geometry_msgs::msg::Pose |
Functions | |
| template<typename Derived > | |
| bool | autoware::localization::ndt::try_stabilize_covariance (Eigen::MatrixBase< Derived > &covariance, typename Derived::PlainMatrix::Scalar scaling_factor=0.01) |
| template<typename PoseT , typename TransformT > | |
| void | autoware::localization::ndt::transform_adapters::pose_to_transform (const PoseT &pose, TransformT &transform) |
| template<typename PoseT , typename TransformT > | |
| void | autoware::localization::ndt::transform_adapters::transform_to_pose (const TransformT &transform, PoseT &pose) |
| template<typename T > | |
| void | autoware::localization::ndt::transform_adapters::pose_to_transform (const EigenPose< T > &pose, EigenTransform< T > &transform) |
| template<typename T > | |
| void | autoware::localization::ndt::transform_adapters::pose_to_transform (const EigenPose< T > &pose, RosTransform &transform) |
| template<typename T > | |
| void | autoware::localization::ndt::transform_adapters::pose_to_transform (const EigenPose< T > &pose, RosPose &ros_pose) |
| template<typename T > | |
| void | autoware::localization::ndt::transform_adapters::transform_to_pose (const RosTransform &transform, EigenPose< T > &pose) |
| template<typename T > | |
| void | autoware::localization::ndt::transform_adapters::transform_to_pose (const RosPose &ros_pose, EigenPose< T > &pose) |