measurement_conversion.hpp File Reference
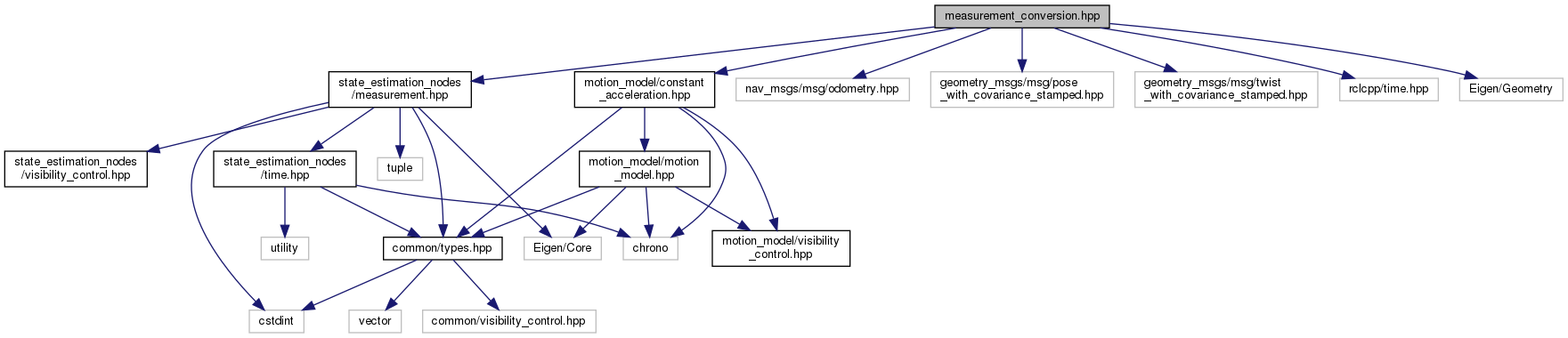
#include <state_estimation_nodes/measurement.hpp>#include <motion_model/constant_acceleration.hpp>#include <nav_msgs/msg/odometry.hpp>#include <geometry_msgs/msg/pose_with_covariance_stamped.hpp>#include <geometry_msgs/msg/twist_with_covariance_stamped.hpp>#include <rclcpp/time.hpp>#include <Eigen/Geometry>
Include dependency graph for measurement_conversion.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::prediction | |
| Functionality relating to prediction, including state estimation, kinematic prediction, maneuver-based prediction, map-aware prediction etc... | |
Typedefs | |
| using | autoware::prediction::MeasurementPose = Measurement< common::types::float32_t, motion::motion_model::ConstantAcceleration::States::POSE_X, motion::motion_model::ConstantAcceleration::States::POSE_Y > |
| using | autoware::prediction::MeasurementPoseAndSpeed = Measurement< common::types::float32_t, motion::motion_model::ConstantAcceleration::States::POSE_X, motion::motion_model::ConstantAcceleration::States::POSE_Y, motion::motion_model::ConstantAcceleration::States::VELOCITY_X, motion::motion_model::ConstantAcceleration::States::VELOCITY_Y > |
| using | autoware::prediction::MeasurementSpeed = Measurement< common::types::float32_t, motion::motion_model::ConstantAcceleration::States::VELOCITY_X, motion::motion_model::ConstantAcceleration::States::VELOCITY_Y > |
Functions | |
| template<typename MeasurementT , typename MessageT > | |
| MeasurementT | autoware::prediction::message_to_measurement (const MessageT &, const Eigen::Isometry3f &) |
| Interface for converting a message into a measurement. More... | |
| template<std::int32_t kStateDimentionality, typename FloatT > | |
| static constexpr Eigen::Transform< FloatT, kStateDimentionality, Eigen::TransformTraits::Isometry > | autoware::prediction::downscale_isometry (const Eigen::Transform< FloatT, 3, Eigen::TransformTraits::Isometry > &isometry) |
| Downscale the isometry to a lower dimention if needed. More... | |
| template<> | |
| STATE_ESTIMATION_NODES_PUBLIC MeasurementPoseAndSpeed | autoware::prediction::message_to_measurement (const nav_msgs::msg::Odometry &msg, const Eigen::Isometry3f &tf_world_message) |
| Specialization of message_to_measurement for odometry message. More... | |
| template<> | |
| STATE_ESTIMATION_NODES_PUBLIC MeasurementSpeed | autoware::prediction::message_to_measurement (const geometry_msgs::msg::TwistWithCovarianceStamped &msg, const Eigen::Isometry3f &tf_world_message) |
| Specialization of message_to_measurement for twist message. More... | |
| template<> | |
| STATE_ESTIMATION_NODES_PUBLIC MeasurementPose | autoware::prediction::message_to_measurement (const geometry_msgs::msg::PoseWithCovarianceStamped &msg, const Eigen::Isometry3f &tf_world_message) |
| Specialization of message_to_measurement for pose message. More... | |