ndt_optimization_problem.hpp File Reference
#include <ndt/ndt_map.hpp>#include <ndt/ndt_scan.hpp>#include <ndt/ndt_config.hpp>#include <optimization/optimization_problem.hpp>#include <optimization/utils.hpp>#include <ndt/utils.hpp>#include <experimental/optional>#include <Eigen/Core>#include <Eigen/Geometry>#include <tuple>#include "common/types.hpp"
Include dependency graph for ndt_optimization_problem.hpp:

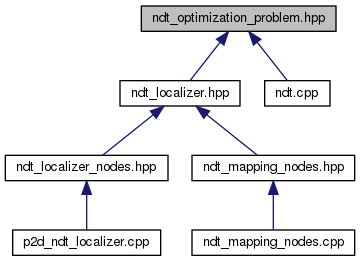
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::localization::ndt::P2DNDTObjective< MapT > |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::localization | |
| autoware::localization::ndt | |
Typedefs | |
| template<typename MapT > | |
| using | autoware::localization::ndt::P2DNDTOptimizationProblem = common::optimization::UnconstrainedOptimizationProblem< P2DNDTObjective< MapT >, EigenPose< Real >, 6U > |
Functions | |
| template<typename ScalarT > | |
| bool8_t | autoware::localization::ndt::is_valid_probability (ScalarT p) |