parking_planner.cpp File Reference
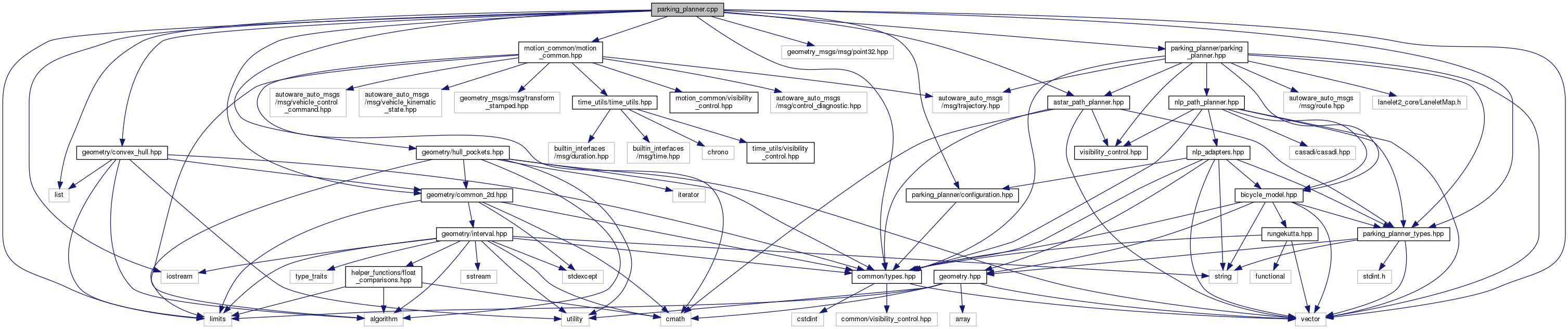
#include <common/types.hpp>#include <geometry/common_2d.hpp>#include <geometry/convex_hull.hpp>#include <geometry/hull_pockets.hpp>#include <geometry_msgs/msg/point32.hpp>#include <motion_common/motion_common.hpp>#include <iostream>#include <vector>#include <limits>#include <list>#include "parking_planner/configuration.hpp"#include "parking_planner/parking_planner.hpp"#include "parking_planner/parking_planner_types.hpp"#include "parking_planner/astar_path_planner.hpp"
Include dependency graph for parking_planner.cpp:
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::motion | |
| This namespace is for motion planning, motion models, and related functionality. | |
| autoware::motion::planning | |
| autoware::motion::planning::parking_planner | |
| Classes and functionality for planning parking maneuvers. | |
Typedefs | |
| using | autoware::motion::planning::parking_planner::Point = geometry_msgs::msg::Point32 |
Functions | |
| static std::vector< VehicleState< float64_t > > | autoware::motion::planning::parking_planner::resize_state_vector (const std::vector< VehicleState< float64_t >> &states_input, const std::size_t target_length) |
| static Point | autoware::motion::planning::parking_planner::lanelet_point_to_point (const lanelet::ConstPoint3d &lanelet_point) |
| bool | autoware::motion::planning::parking_planner::are_points_equal (const Point &p1, const Point &p2) |
| template<typename Iter1 , typename Iter2 > | |
| static std::vector< std::list< Point > > | autoware::motion::planning::parking_planner::get_pocket_hulls (const Iter1 polygon_start, const Iter1 polygon_end, const Iter2 convex_hull_start, const Iter2 convex_hull_end) |
| template<typename Iter > | |
| static std::vector< std::list< Point > > | autoware::motion::planning::parking_planner::get_outer_boxes (const lanelet::Polygon3d &drivable_area, const Iter convex_hull_start, const Iter convex_hull_end) |
| PARKING_PLANNER_PUBLIC std::vector< Polytope2D< float64_t > > | autoware::motion::planning::parking_planner::convert_drivable_area_to_obstacles (const lanelet::Polygon3d &drivable_area) |
| PARKING_PLANNER_PUBLIC autoware_auto_msgs::msg::Trajectory | autoware::motion::planning::parking_planner::convert_parking_planner_to_autoware_trajectory (const Trajectory< float64_t > &parking_trajectory) |