Trajectory Following
Table of Contents
Simple trajectory following in LGSVL
The test_trajectory_following package contains launch files, param and scripts for easier integration testing of different modules needed for trajectory following functionality.
For example this package can be used for simulator testing with a dummy/spoofed trajectory. To do so, follow the instructions below:
- Start LGSVL
- Launch the trajectory test node: ros2 launch test_trajectory_following simple_trajectory_following.launch.py sim_type:=lgsvl
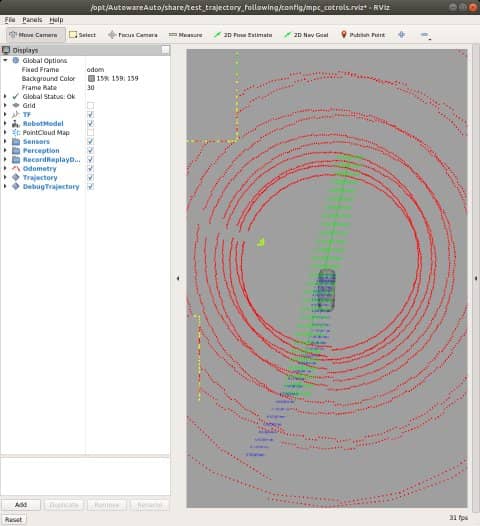
The launch file start spoofing a trajectory and bring up an rviz visualization. By default green is the trajectory from planner/record replay, whatever is being sent to the controller, and blue is the internal representation of the mpc controller, which may be interpolated, smoothed, and predicted.
Autoware.Auto trajectory following