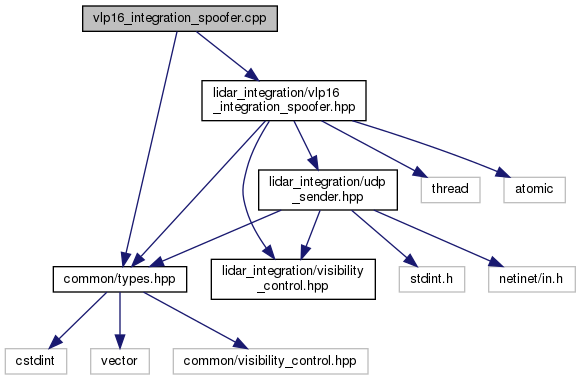
vlp16_integration_spoofer.cpp File Reference
Include dependency graph for vlp16_integration_spoofer.cpp:
Namespaces | |
| lidar_integration | |
Variables | |
| static constexpr float32_t | lidar_integration::MIN_RPM = 300.0F |
| rpm min speed More... | |
| static constexpr float32_t | lidar_integration::MAX_RPM = 1200.0F |
| rpm max speed More... | |
| static constexpr uint32_t | lidar_integration::RAY_SIZE = 16U |
| static constexpr uint16_t | lidar_integration::AZIMUTH_ROTATION_RESOLUTION = 36000U |
| resolution of azimuth angle: number of points in a full rotation More... | |
| static constexpr float32_t | lidar_integration::DEG2IDX |
| conversion from a degree (vlp) to idx More... | |
| static constexpr uint32_t | lidar_integration::NUM_INTENSITY_VALUES = 256U |
| how intensity is quantized: 1 byte = 256 possible values More... | |
| static constexpr uint16_t | lidar_integration::NUM_BLOCKS_PER_PACKET = 12U |
| static constexpr uint16_t | lidar_integration::NUM_POINTS_PER_BLOCK = 32U |
| number of points stored in a data block More... | |
| static constexpr float32_t | lidar_integration::FIRE_SEQ_OFFSET_US = 55.296F |
| full (16 point) fire sequence takes this long to cycle More... | |
| static constexpr float32_t | lidar_integration::FIRE_DURATION_US = 2.304F |
| one laser fires for this long More... | |