map.cpp File Reference
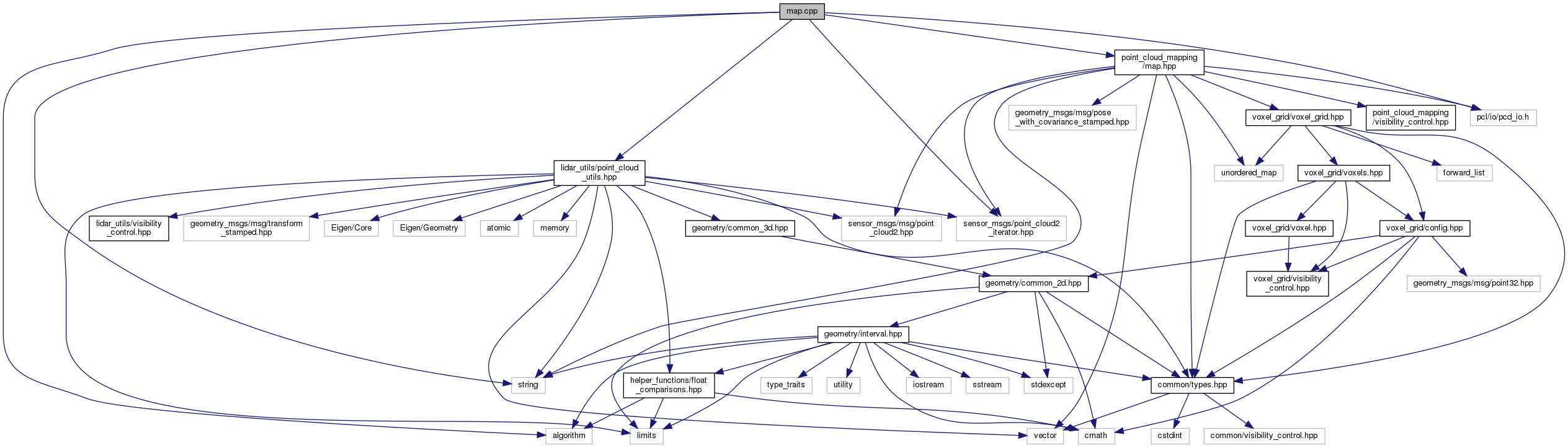
#include <point_cloud_mapping/map.hpp>#include <sensor_msgs/point_cloud2_iterator.hpp>#include <lidar_utils/point_cloud_utils.hpp>#include <pcl/io/pcd_io.h>#include <algorithm>#include <string>
Include dependency graph for map.cpp:
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::mapping | |
| autoware::mapping::point_cloud_mapping | |