parking_planner.hpp File Reference
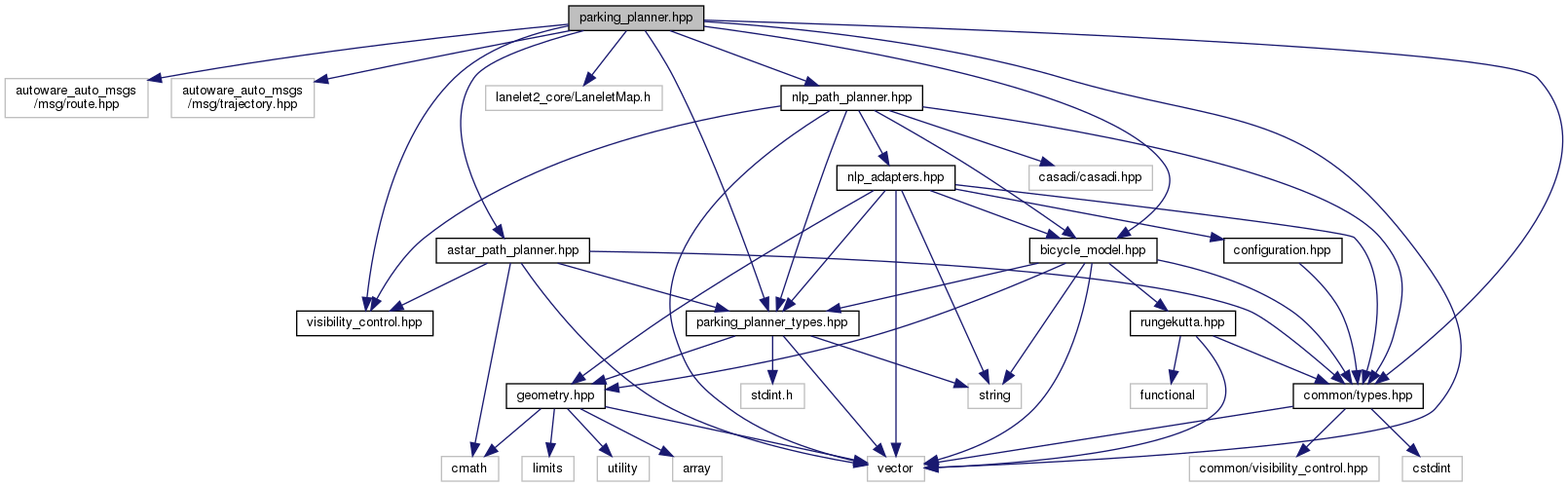
#include <autoware_auto_msgs/msg/route.hpp>#include <autoware_auto_msgs/msg/trajectory.hpp>#include <common/types.hpp>#include <lanelet2_core/LaneletMap.h>#include <vector>#include "astar_path_planner.hpp"#include "bicycle_model.hpp"#include "nlp_path_planner.hpp"#include "parking_planner_types.hpp"#include "visibility_control.hpp"
Include dependency graph for parking_planner.hpp:
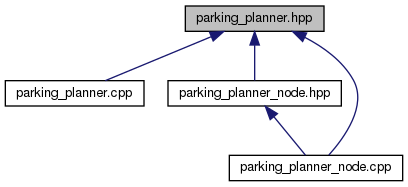
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::motion::planning::parking_planner::PlanningResult |
| Results of a parking planning call. More... | |
| class | autoware::motion::planning::parking_planner::ParkingPlanner |
| Parking motion planner. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::motion | |
| This namespace is for motion planning, motion models, and related functionality. | |
| autoware::motion::planning | |
| autoware::motion::planning::parking_planner | |
| Classes and functionality for planning parking maneuvers. | |
Enumerations | |
| enum | autoware::motion::planning::parking_planner::PlanningStatus { autoware::motion::planning::parking_planner::PlanningStatus::OK, autoware::motion::planning::parking_planner::PlanningStatus::NLP_ERROR } |
| Parking planner return codes. More... | |
Functions | |
| PARKING_PLANNER_PUBLIC std::vector< Polytope2D< float64_t > > | autoware::motion::planning::parking_planner::convert_drivable_area_to_obstacles (const lanelet::Polygon3d &drivable_area) |
| PARKING_PLANNER_PUBLIC autoware_auto_msgs::msg::Trajectory | autoware::motion::planning::parking_planner::convert_parking_planner_to_autoware_trajectory (const Trajectory< float64_t > &parking_trajectory) |