point_cloud_mapper.hpp File Reference
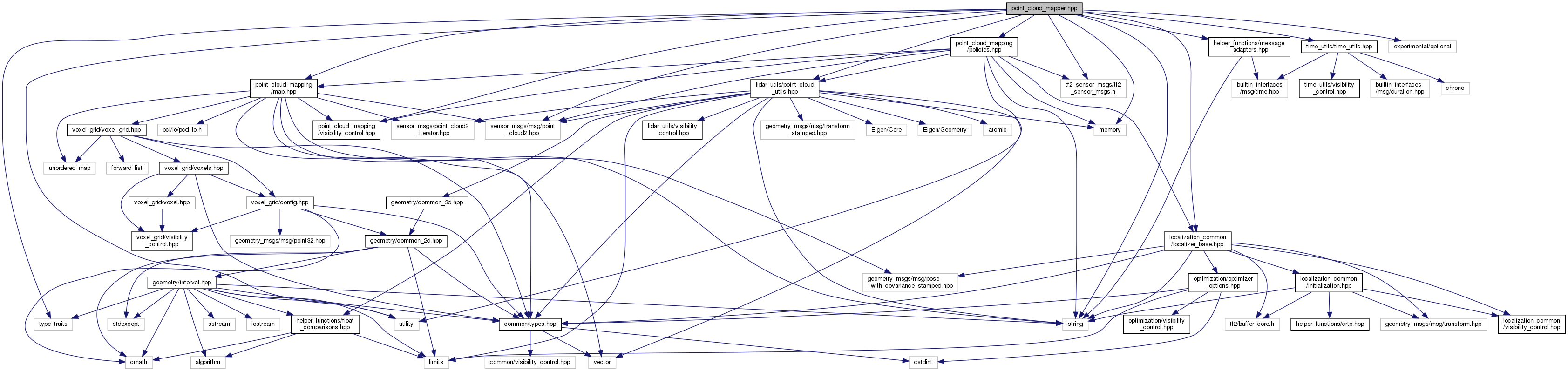
#include <point_cloud_mapping/visibility_control.hpp>#include <localization_common/localizer_base.hpp>#include <sensor_msgs/msg/point_cloud2.hpp>#include <point_cloud_mapping/map.hpp>#include <tf2_sensor_msgs/tf2_sensor_msgs.h>#include <lidar_utils/point_cloud_utils.hpp>#include <point_cloud_mapping/policies.hpp>#include <helper_functions/message_adapters.hpp>#include <time_utils/time_utils.hpp>#include <experimental/optional>#include <memory>#include <string>#include <utility>#include <type_traits>
Include dependency graph for point_cloud_mapper.hpp:
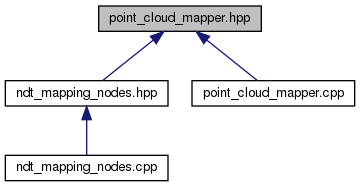
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::mapping | |
| autoware::mapping::point_cloud_mapping | |
Typedefs | |
| template<typename MapIncrementT > | |
| using | autoware::mapping::point_cloud_mapping::RegistrationResult = std::pair< std::reference_wrapper< const MapIncrementT >, geometry_msgs::msg::PoseWithCovarianceStamped > |
| using | autoware::mapping::point_cloud_mapping::Cloud = sensor_msgs::msg::PointCloud2 |
| using | autoware::mapping::point_cloud_mapping::CloudPtr = std::shared_ptr< Cloud > |
| using | autoware::mapping::point_cloud_mapping::ConstCloudPtr = std::shared_ptr< const Cloud > |