socket_can_id.cpp File Reference
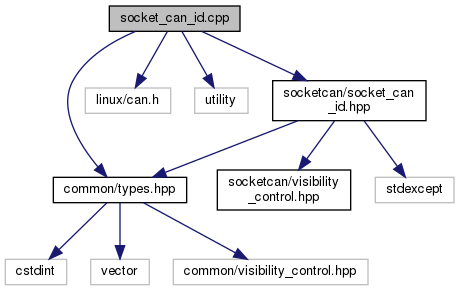
#include <common/types.hpp>#include <linux/can.h>#include <utility>#include "socketcan/socket_can_id.hpp"
Include dependency graph for socket_can_id.cpp:
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::drivers | |
| Libraries, ROS nodes, and other functionality relating to sensor drivers or actuation. | |
| autoware::drivers::socketcan | |
Variables | |
| constexpr CanId::IdT | autoware::drivers::socketcan::EXTENDED_MASK = CAN_EFF_FLAG |
| constexpr CanId::IdT | autoware::drivers::socketcan::REMOTE_MASK = CAN_RTR_FLAG |
| constexpr CanId::IdT | autoware::drivers::socketcan::ERROR_MASK = CAN_ERR_FLAG |
| constexpr CanId::IdT | autoware::drivers::socketcan::EXTENDED_ID_MASK = CAN_EFF_MASK |
| constexpr CanId::IdT | autoware::drivers::socketcan::STANDARD_ID_MASK = CAN_SFF_MASK |