map.hpp File Reference
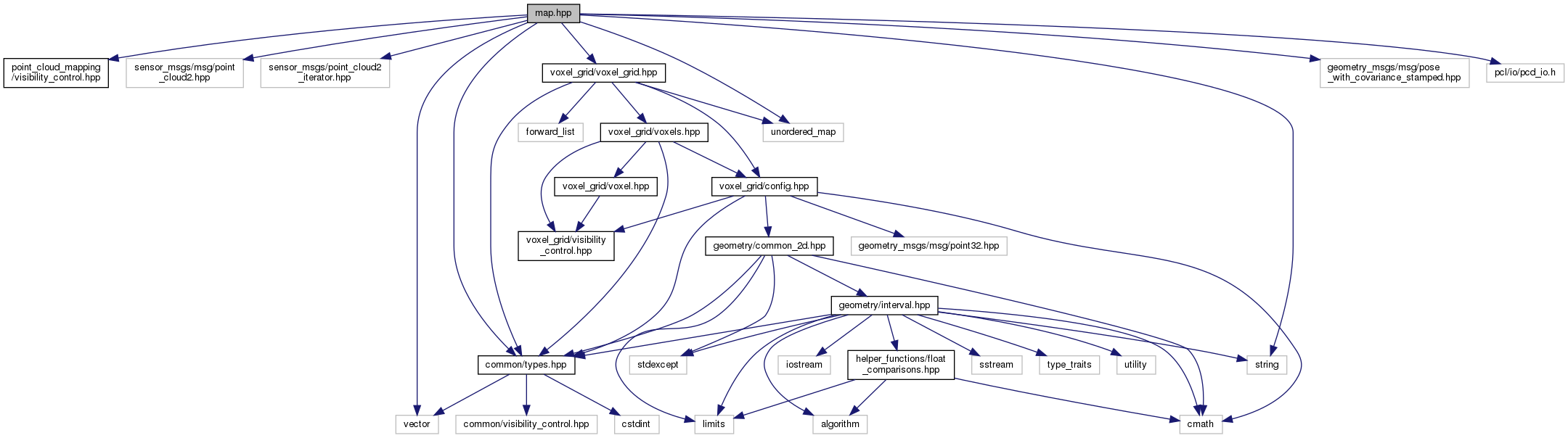
#include <point_cloud_mapping/visibility_control.hpp>#include <sensor_msgs/msg/point_cloud2.hpp>#include <sensor_msgs/point_cloud2_iterator.hpp>#include <voxel_grid/voxel_grid.hpp>#include <geometry_msgs/msg/pose_with_covariance_stamped.hpp>#include <common/types.hpp>#include <pcl/io/pcd_io.h>#include <vector>#include <string>#include <unordered_map>
Include dependency graph for map.hpp:
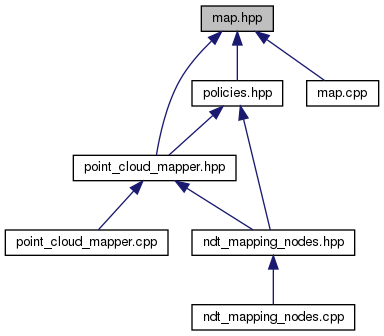
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | autoware::mapping::point_cloud_mapping::MapUpdateSummary |
| Struct containing information on the attempt to push a new observation to a map. More... | |
| class | autoware::mapping::point_cloud_mapping::MapRepresentationBase< IncrementT, StorageModeT > |
| class | autoware::mapping::point_cloud_mapping::PlainPointCloudMap |
| class | autoware::mapping::point_cloud_mapping::VoxelMap |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::mapping | |
| autoware::mapping::point_cloud_mapping | |