ndt_map_publisher.hpp File Reference
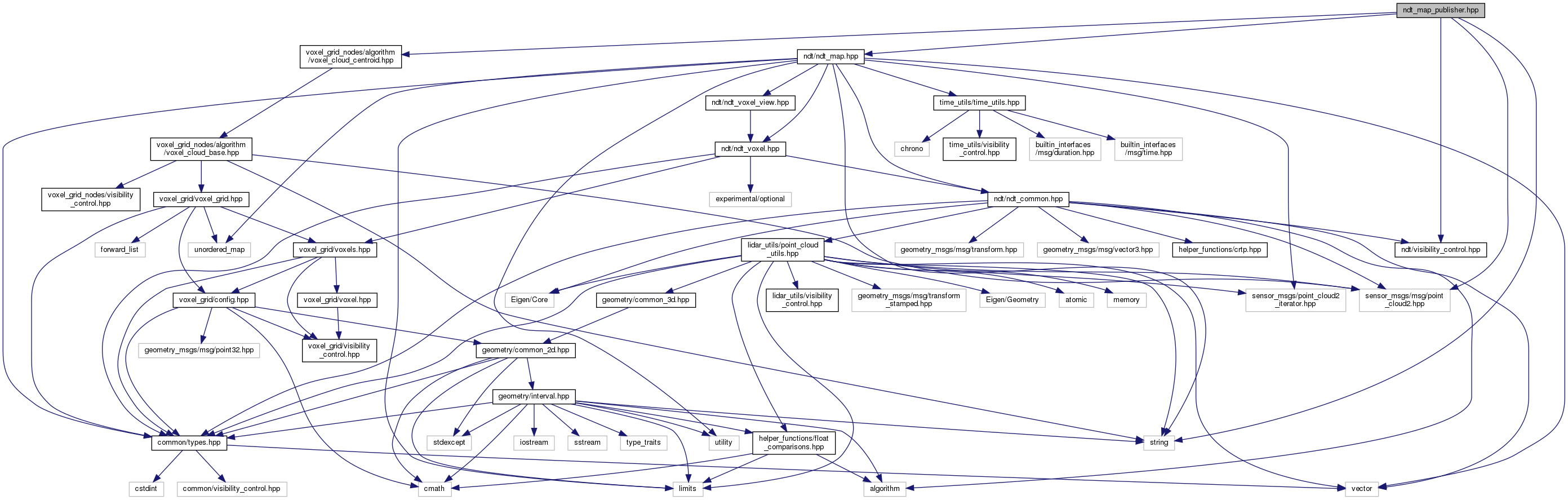
#include <ndt/ndt_map.hpp>#include <ndt/visibility_control.hpp>#include <sensor_msgs/msg/point_cloud2.hpp>#include <voxel_grid_nodes/algorithm/voxel_cloud_centroid.hpp>#include <string>
Include dependency graph for ndt_map_publisher.hpp:
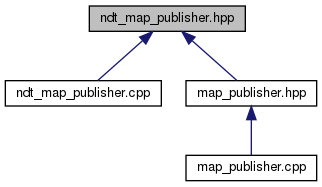
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | autoware::localization::ndt::geodetic_pose_t |
| struct | autoware::localization::ndt::geocentric_pose_t |
| class | autoware::localization::ndt::NDTMapPublisher |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::localization | |
| autoware::localization::ndt | |
Functions | |
| void NDT_PUBLIC | autoware::localization::ndt::read_from_yaml (const std::string &yaml_file_name, geodetic_pose_t *geo_pose) |
| void NDT_PUBLIC | autoware::localization::ndt::read_from_pcd (const std::string &file_name, sensor_msgs::msg::PointCloud2 *msg) |