parking_planner_types.hpp File Reference
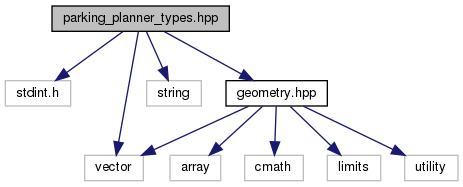
Include dependency graph for parking_planner_types.hpp:
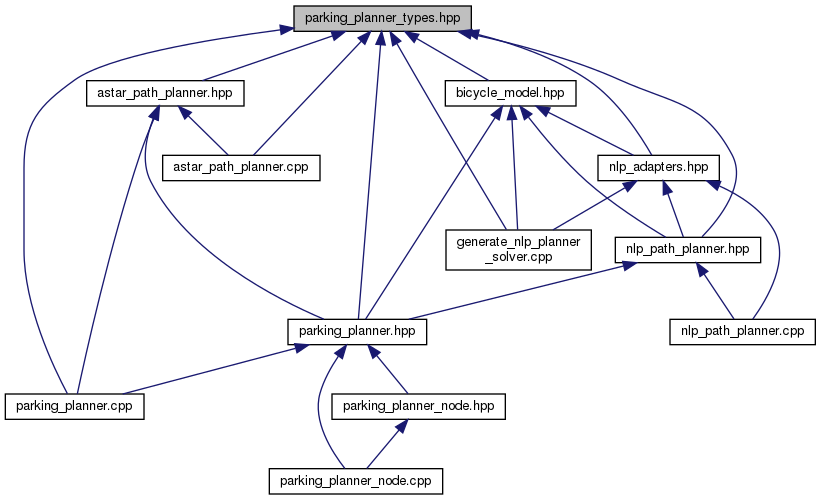
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | autoware::motion::planning::parking_planner::VehicleState< T > |
| Class to represent the state of a vehicle. More... | |
| class | autoware::motion::planning::parking_planner::VehicleCommand< T > |
| Class to represent the inputs of a vehicle. More... | |
| class | autoware::motion::planning::parking_planner::TrajectoryStep< T > |
| Class to represent one timestep in a dynamic trajectory. More... | |
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::motion | |
| This namespace is for motion planning, motion models, and related functionality. | |
| autoware::motion::planning | |
| autoware::motion::planning::parking_planner | |
| Classes and functionality for planning parking maneuvers. | |
Typedefs | |
| template<typename T > | |
| using | autoware::motion::planning::parking_planner::Trajectory = std::vector< TrajectoryStep< T > > |
| Class to represent a dynamic trajectory. More... | |