socket_can_receiver.cpp File Reference
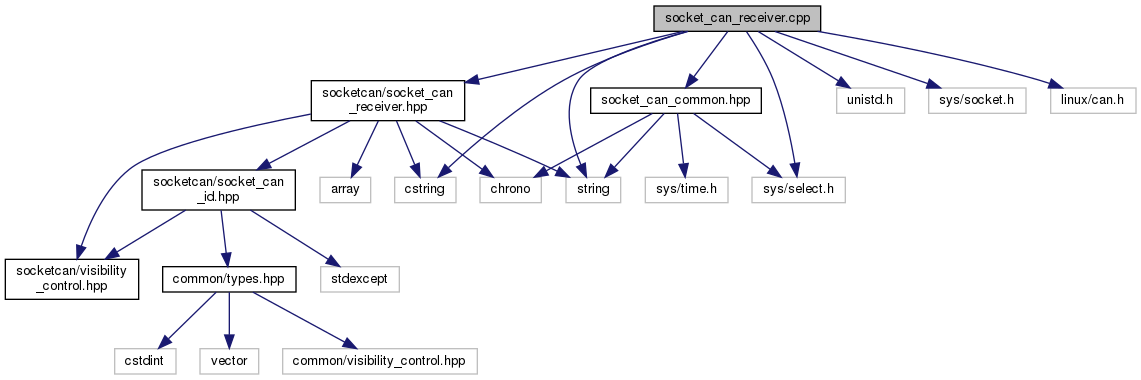
#include "socketcan/socket_can_receiver.hpp"#include "socket_can_common.hpp"#include <unistd.h>#include <sys/select.h>#include <sys/socket.h>#include <linux/can.h>#include <cstring>#include <string>
Include dependency graph for socket_can_receiver.cpp:
Namespaces | |
| autoware | |
| This file defines the lanelet2_map_provider_node class. | |
| autoware::drivers | |
| Libraries, ROS nodes, and other functionality relating to sensor drivers or actuation. | |
| autoware::drivers::socketcan | |