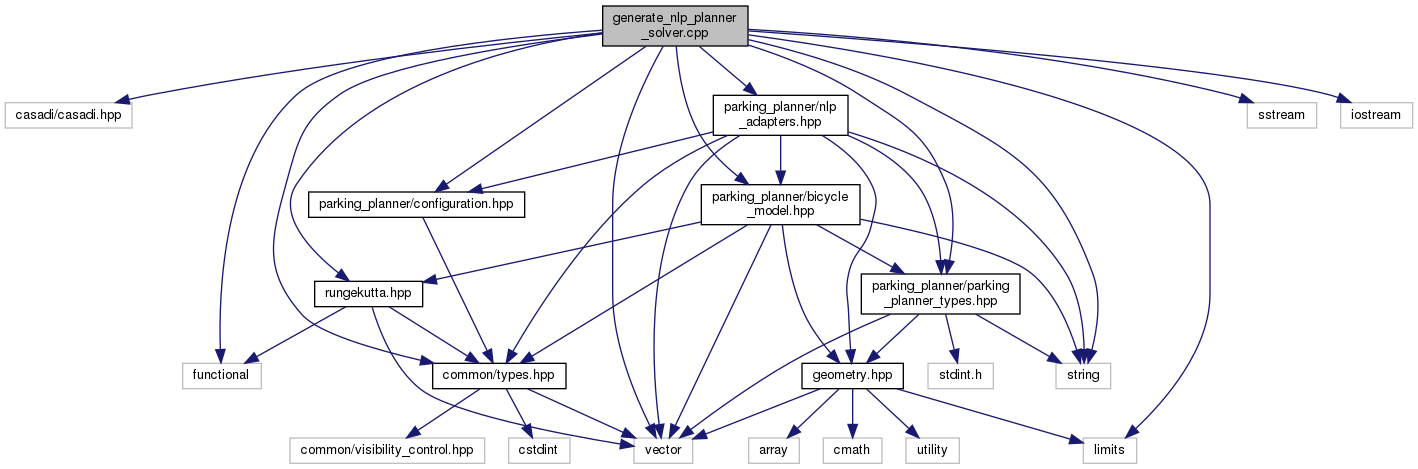
#include <casadi/casadi.hpp>#include <common/types.hpp>#include <vector>#include <functional>#include <string>#include <sstream>#include <iostream>#include <limits>#include "parking_planner/configuration.hpp"#include "parking_planner/parking_planner_types.hpp"#include "parking_planner/bicycle_model.hpp"#include "parking_planner/nlp_adapters.hpp"#include "parking_planner/rungekutta.hpp"
Include dependency graph for generate_nlp_planner_solver.cpp:
Functions | |
| template<class T > | |
| T | make_single_stage_variable (const std::string &name) |
| std::vector< MX > | make_named_variable (const std::string &name, const std::size_t dimension) |
| std::string | indexed_name (const std::string &name, const std::size_t index) |
| template<template< class > class T, typename Y > | |
| Y | convert_to_mx (T< Y > value) |
| MX | matrix_from_vec_of_vec (const std::vector< std::vector< MX >> &vecvec) |
| Trajectory< MX > | make_trajectory_variables (std::size_t number_of_stages) |
| std::vector< Halfplane2D< MX > > | make_halfplane_variables (const std::string &basename, const std::size_t max_obstacle_halfplanes) |
| std::vector< NLPObstacleStageVariables< MX > > | make_obstacle_stage_variables (const std::string &basename, const std::size_t max_obstacle_halfplanes, const std::size_t max_ego_halfplanes) |
| NLPObstacle< MX > | create_abstract_obstacle (const std::string &basename, const std::size_t max_obstacle_halfplanes, const std::size_t max_ego_halfplanes) |
| MX | casadi_dynamics_wrapper (MX state, MX command, MX params) |
| void | create_dynamics_constraints (const Trajectory< MX > &trajectory, const BicycleModelParameters< MX > &vehicle_parameters, const VehicleState< MX > ¤t_state, std::vector< MX > &equality_constraints) |
| void | create_terminal_state_constraint (const Trajectory< MX > &trajectory, const VehicleState< MX > &goal_state, std::vector< MX > &equality_constraints) |
| void | create_single_stage_obstacle_constraints (const VehicleState< MX > &states, const NLPObstacleStageVariables< MX > &obstacle_variables, const DM &G, const MX &g, const MX &A, const MX &b, std::vector< MX > &equality_constraints, std::vector< MX > &inequality_constraints) |
| void | create_obstacle_constraints (const Trajectory< MX > &trajectory, const BicycleModelParameters< MX > &vehicle_parameters, const std::vector< NLPObstacle< MX >> &obstacles, std::vector< MX > &equality_constraints, std::vector< MX > &inequality_constraints) |
| MX | create_cost_function (const Trajectory< MX > &trajectory, const VehicleState< MX > &goal_state, const NLPCostWeights< MX > &cost_weights) |
| void | generate_info_header (const std::string &shared_library_directory, const std::string &output_filename, const std::size_t number_of_equality_constraints, const std::size_t number_of_inequality_constraints) |
| int | main (int argc, char *argv[]) |
Variables | |
| constexpr auto | Nstates = VehicleState<float64_t>::get_serialized_length() |
| constexpr auto | Ncommands = VehicleCommand<float64_t>::get_serialized_length() |
| constexpr auto | Nvehicleparams = BicycleModelParameters<float64_t>::get_serialized_length() |
Function Documentation
◆ casadi_dynamics_wrapper()
| MX casadi_dynamics_wrapper | ( | MX | state, |
| MX | command, | ||
| MX | params | ||
| ) |
◆ convert_to_mx()
template<template< class > class T, typename Y >
| Y convert_to_mx | ( | T< Y > | value | ) |
◆ create_abstract_obstacle()
| NLPObstacle<MX> create_abstract_obstacle | ( | const std::string & | basename, |
| const std::size_t | max_obstacle_halfplanes, | ||
| const std::size_t | max_ego_halfplanes | ||
| ) |
◆ create_cost_function()
| MX create_cost_function | ( | const Trajectory< MX > & | trajectory, |
| const VehicleState< MX > & | goal_state, | ||
| const NLPCostWeights< MX > & | cost_weights | ||
| ) |
◆ create_dynamics_constraints()
| void create_dynamics_constraints | ( | const Trajectory< MX > & | trajectory, |
| const BicycleModelParameters< MX > & | vehicle_parameters, | ||
| const VehicleState< MX > & | current_state, | ||
| std::vector< MX > & | equality_constraints | ||
| ) |
◆ create_obstacle_constraints()
| void create_obstacle_constraints | ( | const Trajectory< MX > & | trajectory, |
| const BicycleModelParameters< MX > & | vehicle_parameters, | ||
| const std::vector< NLPObstacle< MX >> & | obstacles, | ||
| std::vector< MX > & | equality_constraints, | ||
| std::vector< MX > & | inequality_constraints | ||
| ) |
◆ create_single_stage_obstacle_constraints()
| void create_single_stage_obstacle_constraints | ( | const VehicleState< MX > & | states, |
| const NLPObstacleStageVariables< MX > & | obstacle_variables, | ||
| const DM & | G, | ||
| const MX & | g, | ||
| const MX & | A, | ||
| const MX & | b, | ||
| std::vector< MX > & | equality_constraints, | ||
| std::vector< MX > & | inequality_constraints | ||
| ) |
◆ create_terminal_state_constraint()
| void create_terminal_state_constraint | ( | const Trajectory< MX > & | trajectory, |
| const VehicleState< MX > & | goal_state, | ||
| std::vector< MX > & | equality_constraints | ||
| ) |
◆ generate_info_header()
| void generate_info_header | ( | const std::string & | shared_library_directory, |
| const std::string & | output_filename, | ||
| const std::size_t | number_of_equality_constraints, | ||
| const std::size_t | number_of_inequality_constraints | ||
| ) |
◆ indexed_name()
| std::string indexed_name | ( | const std::string & | name, |
| const std::size_t | index | ||
| ) |
◆ main()
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
◆ make_halfplane_variables()
| std::vector<Halfplane2D<MX> > make_halfplane_variables | ( | const std::string & | basename, |
| const std::size_t | max_obstacle_halfplanes | ||
| ) |
◆ make_named_variable()
| std::vector<MX> make_named_variable | ( | const std::string & | name, |
| const std::size_t | dimension | ||
| ) |
◆ make_obstacle_stage_variables()
| std::vector<NLPObstacleStageVariables<MX> > make_obstacle_stage_variables | ( | const std::string & | basename, |
| const std::size_t | max_obstacle_halfplanes, | ||
| const std::size_t | max_ego_halfplanes | ||
| ) |
◆ make_single_stage_variable()
template<class T >
| T make_single_stage_variable | ( | const std::string & | name | ) |
◆ make_trajectory_variables()
| Trajectory<MX> make_trajectory_variables | ( | std::size_t | number_of_stages | ) |
◆ matrix_from_vec_of_vec()
| MX matrix_from_vec_of_vec | ( | const std::vector< std::vector< MX >> & | vecvec | ) |
Variable Documentation
◆ Ncommands
|
constexpr |
◆ Nstates
|
constexpr |
◆ Nvehicleparams
|
constexpr |